Supraleiter und ihre Potenziale für die Fabrik- und Prozessautomation
Noch befindet sich der Einsatz von Supraleitern im Bereich der Industrieautomation im Entwicklungsstadium. Aber schon heute sind mit der Technologie völlig neue und effiziente Prozesse denkbar. Große Potenziale gibt es überall dort, wo eine berührungslose Lagerung oder Handhabung gefragt ist – beispielsweise aufgrund von Reinigungsaspekten, bei räumlicher Trennung oder im Umgang mit empfindlichen Objekten. Ziel von Festo ist es, gemeinsam mit evico und Partnern aus der Wissenschaft die Erforschung von Supraleitern für den industriellen Einsatz voranzutreiben und die Technologie kontinuierlich weiterzuentwickeln.
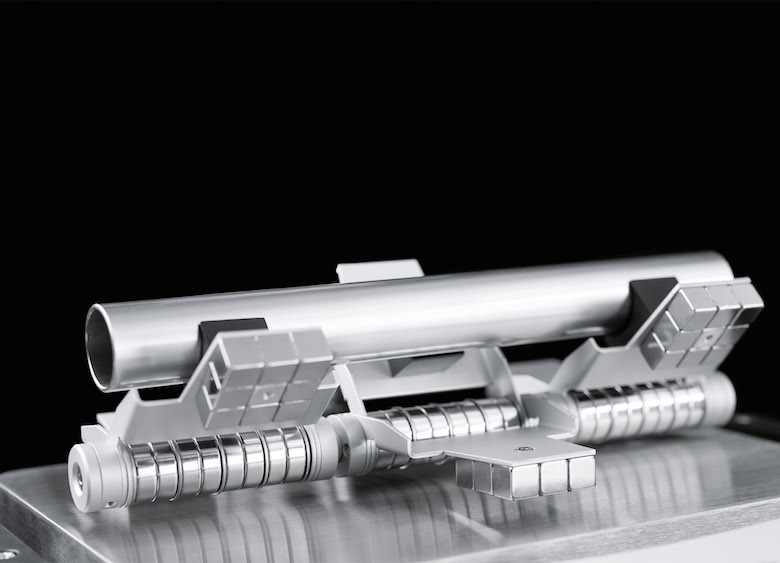
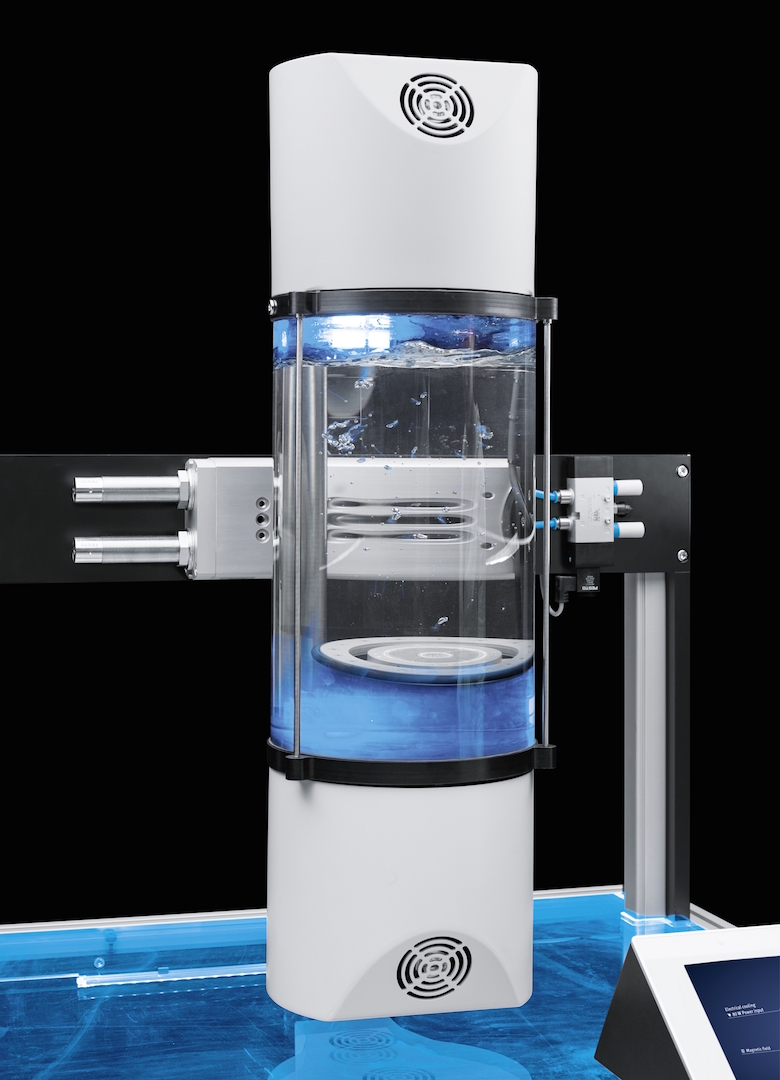
Festo zeigt auf der Hannover Messe 2016 drei neue Anwendungsmöglichkeiten: die berührungslose Übergabe von schwebenden Trägerplatten in der Horizontalen, das mechanische Greifen bei räumlicher Trennung und die Bewegung eines Objekts in einem geschlossenen Rohr.
SupraMotion 2016 demonstriert einmal mehr die faszinierenden Eigenschaften von Supraleitern. Kühlt man sie auf eine bestimmte Temperatur ab, können sie das Feld eines Permanentmagneten in einem definierten Abstand einfrieren, sodass entweder sie selbst schweben oder der Magnet. Der Schwebespalt bleibt in jeder Raumlage stets stabil. Dieses Phänomen ermöglicht es, Objekte berührungslos zu lagern und zu bewegen – mit geringem Energieaufwand und ganz ohne Regelungstechnik.
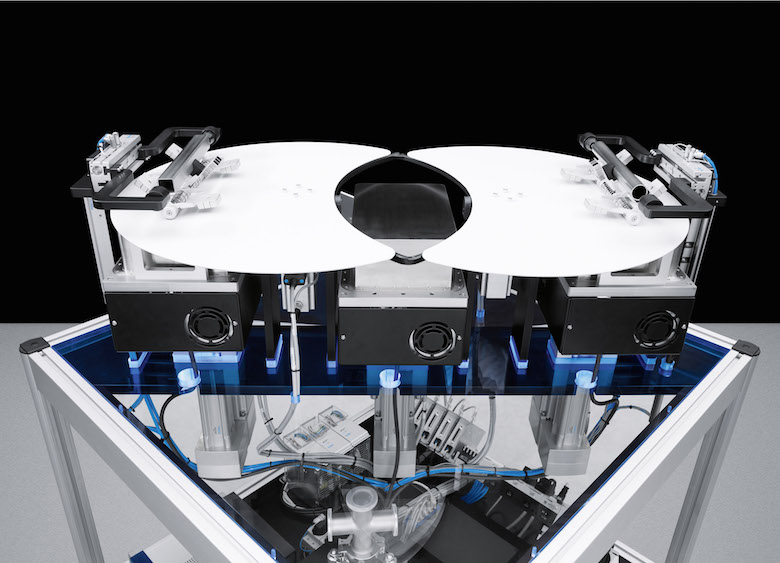
Beim SupraGripper schweben zwei Greifer mit je drei Fingern frei über zwei halbmondförmigen Platten. Der Schwebeeffekt wird durch insgesamt drei Kryostate erzielt, die unterhalb der Platten verbaut sind und sich mit Elektrozylindern jeweils nach oben und unten fahren lassen. Dadurch schweben die Greifer entweder über den Platten oder werden auf ihnen abgelegt. Zusätzlich können die beiden Platten mithilfe von zwei Drehantrieben rotiert und gezielt positioniert werden, sodass sich die beiden Greifer von einem Kryostaten zum nächsten transportieren lassen. Fünf Controller CMMO-ST steuern dabei sowohl Zylinder als auch Drehantriebe. Sie verfügen über modernste Kommunikationstechnik wie Ethernet oder IO-Link und beziehen ihre Daten aus der Festo Cloud, was eine schnelle Inbetriebnahme ermöglicht.
Zu Beginn übergeben zwei konventionelle Greifer den beiden schwebenden Greifern jeweils ein Objekt. Um es zu greifen, geben auf den Kryostaten sitzende elektrische Spulen einen Impuls ab. Dieser löst die gespeicherte Verbindung zu den magnetischen Greiferelementen oder stellt sie wieder her, wodurch die einzelnen Fingerelemente nach unten oder oben klappen und sich die Greifer öffnen oder schließen.
Anwendungsmöglichkeiten und Einsatzpotenziale
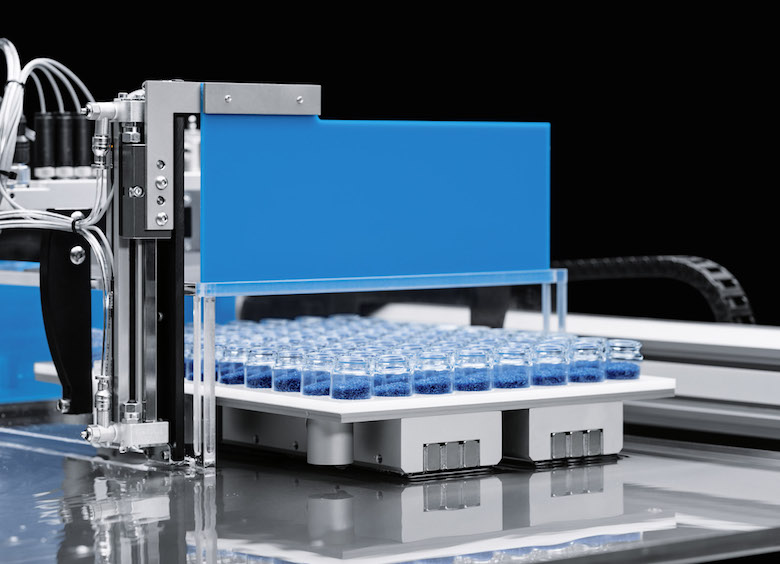
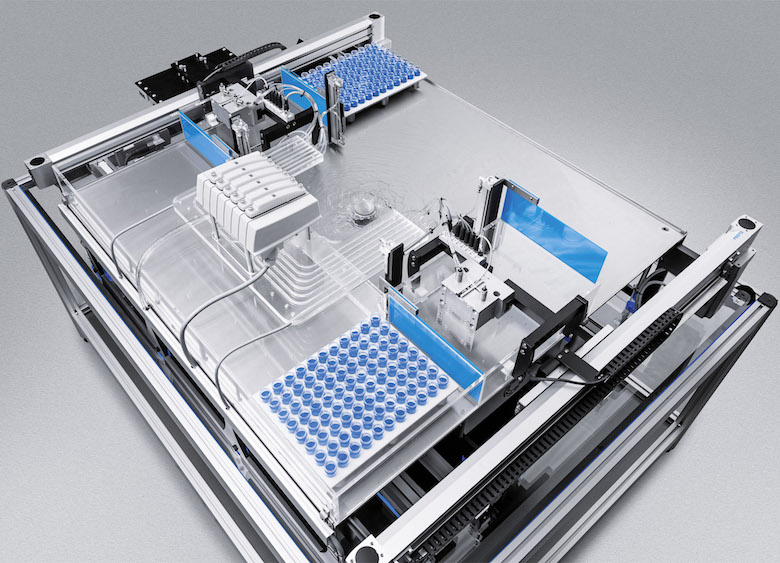
Die räumliche Trennung von magnetischem Greifer und supraleitendem Antrieb eröffnet völlig neue Lösungsmöglichkeiten in rauen bis hin zu äußerst reinen Umgebungen – beispielsweise in der Pharma- und Chemieindustrie, der Laborautomation oder der Medizintechnik.
Der elektrische Impuls zum Öffnen und Schließen der Finger ermöglicht ein berührungsloses mechanisches Greifen über einer geschlossenen Oberfläche und sogar in geschlossenen Räumen. Ebenso wäre ein Greifen und Übergeben von Produkten mitsamt dem Greifsystem über die Grenzen des Handlings hinweg denkbar. Statt der beiden Drehteller könnte unterhalb der Anwendung ein Förderband laufen. Dabei ließe sich – je nach Bedarf – steuern, ob der Greifer oder das Greifgut mittransportiert werden soll.